SIG MESH理论教程
SIG MESH初体验
SIG MESH的简介
Nordic MESH SDK 文档框架简介
SIG MESH各个角色的功能简介
SIG MESH协议各个层的作用
什么是Element和Model
如何使用SES搭建SIG MESH开发环境
如何使用VSCode搭建SIG MESH开发环境
Mesh Beacon帧格式
PB-GATT入网过程
PB-ADV入网过程
SIG MESH第一个实例---Generic On Off Model
BLE Mesh各层帧包格式详解
Configuration Model浅析
Health Model浅析
Proxy Node详解及其工作流程
Relay Node详解及其工作流程
Friend Node与Low Power Node详解及其工作流程
Multi Role的实现
Vendor Model浅析
创建红旭Model
自主分包与MESH协议分包重组的区别
接入天猫精灵
IV Index更新过程
密钥更新过程
创建红旭Model-移植
如无权限阅读,请联系微信:17625815328
-
+
首页
如何使用VSCode搭建SIG MESH开发环境
# 前言 继上一章节讲完了**如何使用SES搭建SIG MESH开发环境**,我相信大部分人都已经可以愉快地使用SES开始自己的SIG MESH之旅了。然而,此次小编却剑走偏锋采用**CMake+Vscode+nRF5-SDK-for-Mesh**的组合来搭建此次MESH的开发环境。因此,本章节仅适合有一定基础且又进取的人,从而也不太适合啥都要现成的工程师 **(如果有的话,看到这里就可以移动你的鼠标到右上角,并单击)** 首先,采用这样的组合方式在业内不是属于首次,互联网上已经大量充斥着类似的文章。然而,更多的是基于纯应用层的应用,即没有跟硬件绑定在一起的相关场景。只有零星的几篇跟嵌入式开发相关的,因此小编觉得还是有必要借这样的机会写一写的,顺带促进自己的成长。 # 优势 那么这样的组合的方式有什么样的优势呢?小编认为是如下几种: 1. 开源免费,没有版权纠纷。因为CMake以及Vscode均是开源免费的工具软件; 2. 适合于模块化以及大项目工程开发且跨平台,不受平台限制; 3. 提升工程师自身的水平,更了解编译的原理 # 缺点 就我目前的了解,除了入门的门槛有点高之外也没有什么其他的缺点了。当然了,集成化的IDE在调试方面还是会优于这种方式的。 # 准备工作 在开始环境搭建之前,我们还需要安装如下的工具软件: | 工具名称 | 作用 | |-----|-----| | [nRF5x Command Line Tools](https://www.nordicsemi.com/Software-and-Tools/Development-Tools/nRF-Command-Line-Tools/Download#infotabs) | 用于下载以及合并固件,安装时应该将其添加到系统环境变量,必选 | | [SEGGER J-Link](https://www.segger.com/downloads/jlink) | 用于代码调试,必选 | | [Python 2.7](https://www.python.org/downloads/) | 用于运行OTA固件的相关python脚本,安装时应该将其添加到系统环境变量,必选 | | [Python 3.5](https://www.python.org/downloads/) | 用于运行下载或者合并固件的相关脚本,安装时应该将其添加到系统环境变量且是32Bit的安装包(起码3.5.1版本以上);**此处要注意:安装时应将其安装在盘符的根目录下,否则会跟Python2.7冲突**,必选 | | [CMake](https://cmake.org/download/) | 用于生成本地的构建文件,安装时应该将其添加到系统环境变量(最新版本即可),必选 | | [Ninja](https://github.com/ninja-build/ninja/releases) | 基于CMake生成的本地构建文件生成相应的Hex、ELF、MAP等文件,手动将其添加到系统环境变量(最新版本即可),必选 | | [GNU ARM Embedded Toolchain](https://developer.arm.com/open-source/gnu-toolchain/gnu-rm/downloads/) | 工具链,下载**7-2018-q2-update (7.3.1)** ,其他版本的不要下载,安装时将其添加到系统环境变量,必选 | | [Doxygen](http://www.doxygen.nl/)、[Graphviz](http://www.graphviz.org/)、[Mscgen](http://www.mcternan.me.uk/mscgen/)| 如果还要生成离线的nRF5-SDK-for-Mesh API文档你就必须下载这三个软件(目前官方暂没有提供现成的API手册,那么就只能自己生成了),三个工具软件均要添加到系统环境变量,可选 | | [Visual Studio Code](https://code.visualstudio.com/)| **Cortex Debug插件**,必选;**CMake、CMake Tools、CMake Tools Helper插件**,可选 | 除了上面提到的软件之外,当然你还要下载 [nRF5-SDK-for-Mesh](https://www.nordicsemi.com/Software-and-Tools/Software/nRF5-SDK-for-Mesh/Download#infotabs) 和 [nRF5-SDK](https://www.nordicsemi.com/Software-and-Tools/Software/nRF5-SDK) 两个SDK开发包。 # 环境搭建 安装完上述的软件之后,我们就可以直接用Visual Studio Code打开nRF5-SDK-for-Mesh了,如下所示:  同时,打开之后还需要安装上述提及到的Visual Studio Code插件: 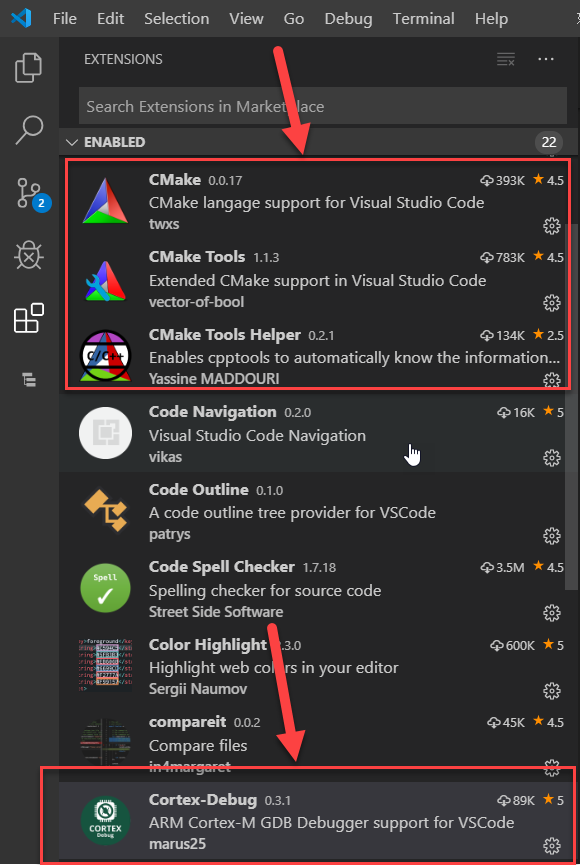 ## 配置Cortex Debug插件 该插件主要是使能在Visual Studio Code中调试Cortex-M内核的MCU,是一个非常不错的插件。由于我们使用的是JLINK调试仿真器,所以我们要告诉这个插件我们JLINK的位置,这样我们再按下F5时,其才会调用JLINK的GDB来进行调试。为实现上面的目的,我们可以这样做:<code>Manage</code>--><code>Settings</code>--><code>Extensions</code>--><code>Cortex-Debug Configuration</code>--><code>JLink GDBServer Path</code>--><code>Edit in settings.json</code>,然后填充自己的JLinkGDBServerCL的路径,下面是小编的路径 ```c C:\\Program Files (x86)\\SEGGER\\JLink\\JLinkGDBServerCL.exe ```  完成上面的配置之后,我们还需要再配置下我们当前调试的是什么型号的MCU、什么调试接口等等,只有这些都完成了才能完美地使用该插件。以下是小编的配置内容,具体的操作请看如下的动图: ```json { // Use IntelliSense to learn about possible attributes. // Hover to view descriptions of existing attributes. // For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387 "version": "0.2.0", "configurations": [ { "cwd": "${workspaceRoot}", "executable": "${workspaceRoot}/build/examples/beaconing/beaconing_nrf52840_xxAA_s140_6.1.1.elf",// 根据自身的情况填充自己的实际路径,这里我仅是我当前演示时使用的示例工程 "name": "Debug Microcontroller", "request": "launch", "type": "cortex-debug", "servertype": "jlink",//调试仿真器的选择,可以支持opennocd、pyocd、pe以及stutil "runToMain": true,//一调试就停在main函数 "device": "nRF52840_xxAA",//设备的型号 "interface": "swd",//SWD接口 "ipAddress": null, "serialNumber": null, }, ] } ```  ## 编译 完成上面的配置之后,接下来我们就要利用CMake对工程进行编译并生成ELF、HEX等文件了。但是,由于我们今天的主角是nRF52840_xxAA,然而工程默认的是nRF52832_xxAA,所以我们还要修改一下相关的文件,如下图所示: 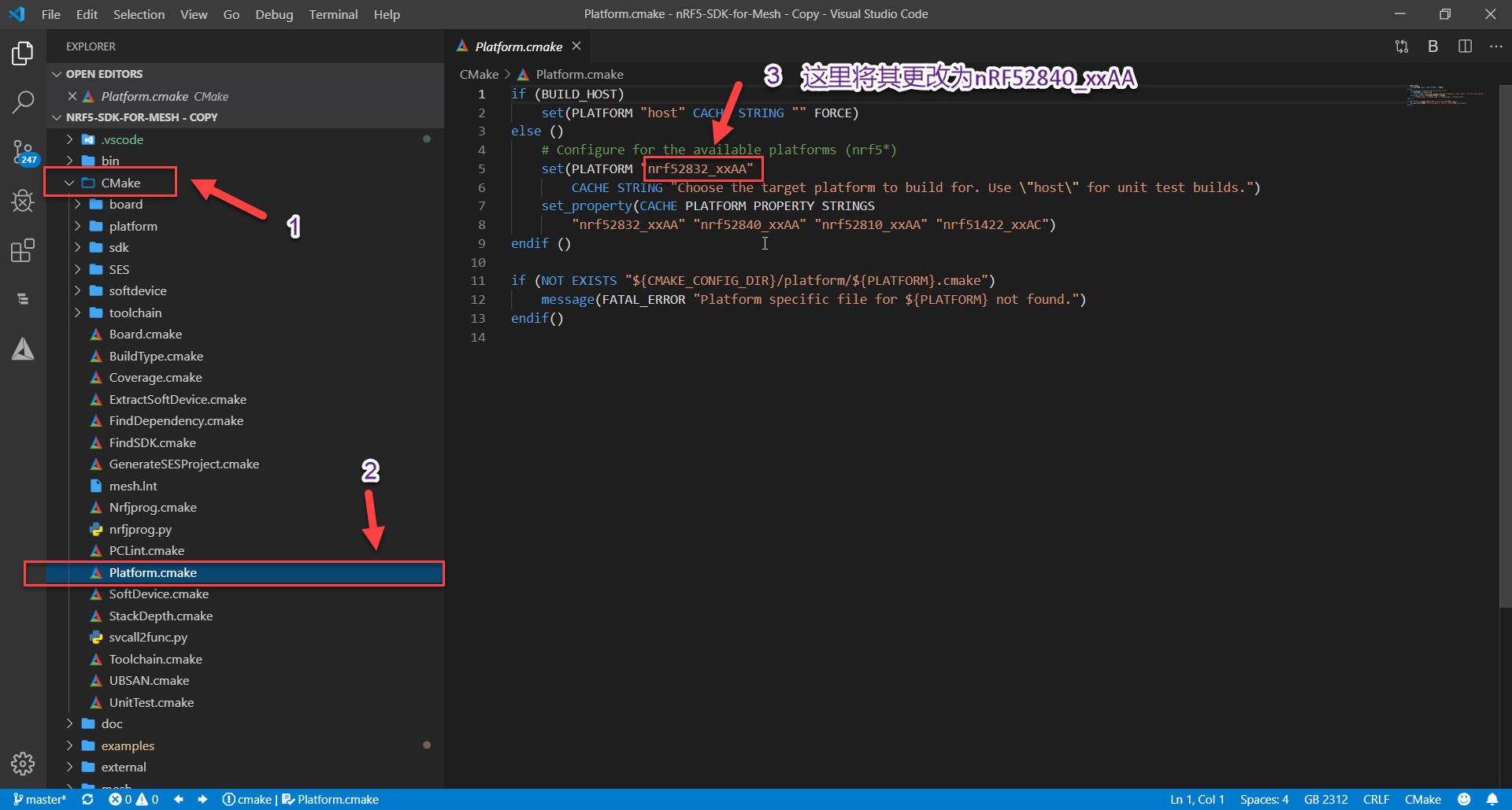 只有这个时候,我们才可以真正地对工程进行编译,具体的操作如下:  然后,我们就可以在根目录看到新建了一个**build**文件夹。 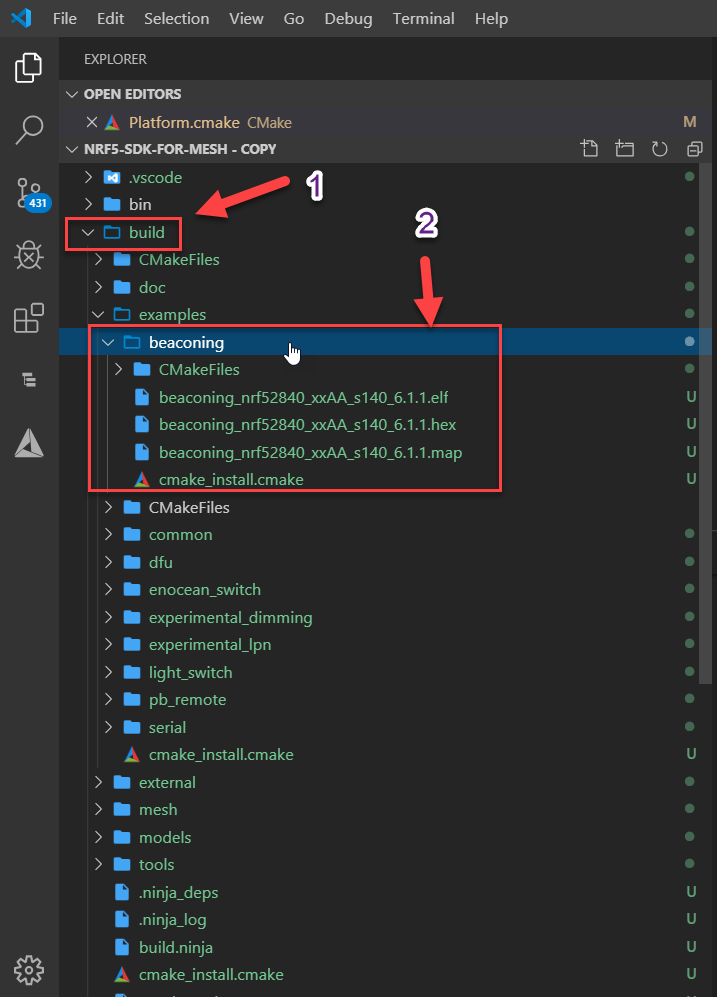 ## 调试下载 编译完成之后,此时应该就会生成相应的ELF、HEX等文件了,那么我们这个时候就可以利用Cortex Debug插件进行调试下载,具体的操作请看如下的动图:  ## 如何生成nRF5-SDK-for-Mesh离线手册 目前,官方并没有把nRF5-SDK-for-Mesh离线手册放在官方的服务器上,而是将生成的方法告诉了我们;目前,我也搞不明白官方的想法。但是,没有关系我们按照官方的方法操作也是可以得到的,具体的操作如下所示:  最后,我们可以在**build**文件夹下,找到生成的离线文件: 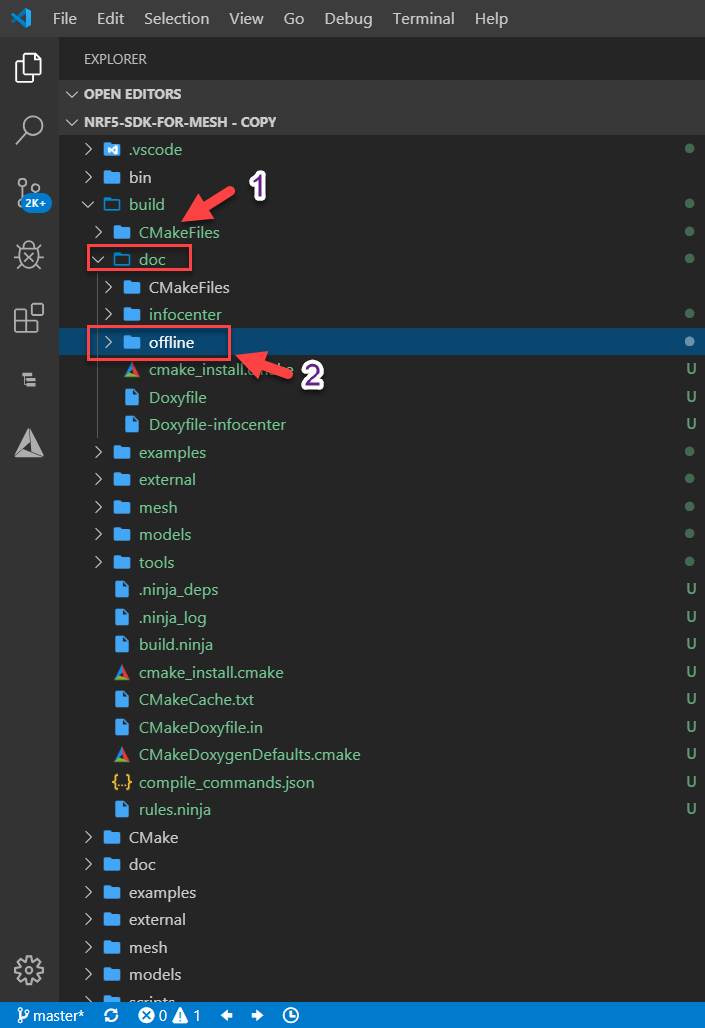
红旭无线官2
2022年2月14日 22:04
2517
0 条评论
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
欢迎关注红旭无线官方微信公众号
分享
链接
类型
密码
更新密码
有效期
Markdown文件
Word文件
PDF文档
PDF文档(打印)


